Spazio
Ci sono gli astronauti sull’Etna: e simulano l’allunaggio con i super robot
A Pian del Lago, sotto il cratere di sud-est, gli scienziati del progetto Arches dell’Esa provano l’impiego del Rover Interact, comandato dal pilota da una stanza d’albergo
Luna, data imprecisata. Il rover Interact si muove sulla polvere scura. È un robot di una sessantina di chilogrammi e con quattro ruote che, se non fosse per i bracci meccanici al posto della testa e per l’assenza di cingoli, ai cinefili potrebbe ricordare Numero 5, l’automa senziente di “Corto circuito”.
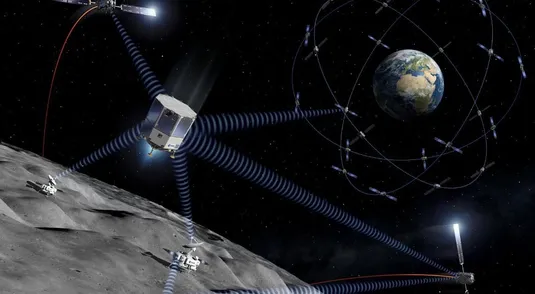
Interact scivola per un secondo, poi si stabilizza. Riprende ad avanzare e scorge un sasso; attiva il suo arto laterale e raccoglie la pietra per portarla a casa, come un bambino farebbe con una conchiglia sulla spiaggia. Poco distante da lui, più vicino alla nave spaziale che li ha scortati fino a lì, due suoi compagni metallici, Lightweight Rover Unit 1 e 2, stanno piazzando le antenne che serviranno per comunicare anche sul lato nascosto della superficie selenica, dove le ground station terrestri - i centri di controllo - non possono inviare né ricevere segnali e dove i robot sono soli. Senza guardarsi, gli automi si scambiano un avviso. La missione procede per il verso giusto, si può continuare.
Fantascienza? Tutt’altro, a patto si sostituiscano la data, che invece di essere vaga è il 29 giugno scorso, e il luogo: non la Luna, ma i fianchi vulcanici dell’Etna, a Pian del Lago, fra i 2.500 e i 2.600 metri di quota, appena sotto lo sbuffo del cratere di sud-est. Lì, in un’area di 500 metri quadrati, Interact e i suoi compagni stanno lavorando insieme con un lander fisso - simulacro dell’astronave deputata a portarli a destinazione - pronto a fornire connessione wi-fi e alimentazione. Con loro, c’è anche un drone simile a un millepiedi, in grado di avventurarsi lungo i pendii più scoscesi e forse anche dentro i tunnel di lava scoperti sulla Luna; lo ha costruito il Karlsruhe institute of technology del Baden-Württemberg e lo ha battezzato Scout.
Insieme, il gruppo di robot sta concludendo “Analog-1”, un progetto dell’Agenzia spaziale europea (l’Esa), la prima fase di una più ampia campagna multi-rover e multi-agenzia organizzata dal Dlr, il Centro aerospaziale tedesco. L’hanno chiamata “Arches”, acronimo di “Autonomous robotic networks to help modern societies”, e per una manciata di giorni, in Sicilia, ha testato la capacità degli automi di collaborare e condividere dati in rete in un “analogo spaziale”, cioè in un ambiente le cui caratteristiche riproducono specifiche condizioni extraterrestri. In più ha verificato, come aveva già fatto Luca Parmitano dalla Stazione spaziale internazionale durante la missione “Beyond”, del 2019, l’efficacia di un controllo umano da remoto: da un albergo a Catania, 23 chilometri distante dall’area operativa, l’astronauta tedesco Thomas Reiter ha infatti preso il controllo di Interact.
Attraverso un’interfaccia capace di restituire anche la resistenza di un oggetto agguantato dal robot - rimanendo dalle parti della fantascienza, la si definirebbe “aptica” -, muovendo un braccio, l’astronauta ha ordinato a Interact di raccogliere sassi. In quel momento, la sua mano ha sperimentato ciò che sentiva la pinza del robot: una dimensione aggiuntiva nel controllo a distanza, tutt’altro che velleitaria se si pensa che presto, nella migliore delle ipotesi entro cinque anni, gli astronauti potranno controllare una squadra di lavoratori robotici dalla Terra o dal Gateway, la stazione spaziale che la Nasa e i partner europei – Italia compresa – programmano di costruire dal 2026 nell’orbita lunare e che sarà l’avamposto umano per dirigere le operazioni sulla superficie del satellite e per fare tappa, prima o poi, verso destinazioni più lontane, su Marte in primis.
«Una missione simulata come questa è un gioco di ruolo in cui è molto importante che i giocatori vivano un’immersione completa», ha spiegato il project manager di Analog-1, Kjetil Wormnes. «In questo caso, ciò significava che gli operatori del rover all’Esoc - il Centro europeo per le operazioni spaziali dell’Esa, a Darmstadt, in Germania, ndr -, così come gli scienziati nel backroom scientifico e, naturalmente, l’astronauta a bordo del nostro Gateway lunare analogico avevano tutti bisogno di sentirsi sulla Luna».
Sull’Etna la morfologia delle rocce ricorda molto la Luna, «e forse un po’ Marte» ha spiegato Thomas Krueger, direttore dello Human Robot Interaction Lab dell’Esa, cui si deve la realizzazione di Interact. «Certo avremmo preferito che un astronauta controllasse il rover da una stazione spaziale, ma dal punto di vista logistico sarebbe stato complicato. Abbiamo quindi deciso di procedere a tappe: nel 2019, grazie all’esperimento con Parmitano, abbiamo dimostrato di poter controllare un robot dall’orbita. Nel 2022 abbiamo provato, con Arches, che si possono eseguire compiti in un ambiente molto simile a quello lunare».
«Quello che abbiamo scoperto è che il controllo remoto continuo è molto impegnativo per un astronauta; abbiamo quindi aggiunto funzionalità per alleviare la pressione, l’equivalente della guida assistita nelle automobili moderne. Adesso l’operatore può indicare una posizione e lasciare che sia il rover a decidere come arrivarci in sicurezza. La sua rete neurale è stata programmata per riconoscere da sé rocce scientificamente preziose», ha spiegato Reiter, “il pilota”, dopo il test.
Sono capacità, come suggerisce l’acronimo stesso “Arches”, utili non solo in un’eventuale ambiente extraterrestre. Ed è questo il punto fondamentale della quasi totalità delle nostre attività spaziali: sviluppare abilità necessarie per operare oltre l’atmosfera, dagli asteroidi a Marte, impone sfide tecnologico-scientifiche le cui applicazioni si riflettono nella vita di tutti e qui, sulla Terra: non avremmo i sistemi di geoposizionamento come il Gps o Galileo se non fossimo stati in grado di pensarli e costruirli oltre il cielo. Il traffico aereo e quello marittimo sarebbero ben diversi senza i satelliti. Ma anche diagnosticare anzitempo alcuni tumori al seno sarebbe impossibile se non si applicasse un software in realtà inventato per far funzionare il telescopio spaziale Hubble, una trentina di anni fa. «L’idea di inviare robot in luoghi pericolosi per gli umani e controllarli da distanza non solo è interessante per quanto riguarda lo spazio, ma anche se consideriamo scenari come una centrale nucleare, si pensi a Fukushima, allo smaltimento dei rifiuti o a operazioni sottomarine, per esempio sugli impianti petroliferi», ha continuato Krueger. «Per questo penso che lo sviluppo di sistemi robotici faccia fronte a quelle che gli addetti ai lavori chiamano le quattro D: dull, dangerous, dirty e dear. Avremo condizioni migliori per l’uomo, che non sarebbe esposto ad alcun rischio». «Verrà il momento in cui anche gli astronauti europei lasceranno le loro impronte sulla superficie della Luna. E anche in uno scenario del genere, il funzionamento condiviso dei sistemi robotici e dell’equipaggio in superficie sarà efficiente», ha aggiunto Reiter.
A onor del vero, premesso che un accordo per ospitare i primi tre europei sul Gateway sia stato sottoscritto a giugno fra la Nasa e l’Esa, programmi come Arches evocano anche sviluppi diversi: l’esplorazione robotica del cosmo è tanto promettente da far paventare a qualcuno la fine dei pellegrinaggi cosmici dell’uomo. Nel loro libro “The end of astronauts. Why robots are the future of exploration” (Harvard University Press, 2022, 173 ppgg.), se ne dicono convinti anche Donald Goldsmith e Martin Rees, fra i divulgatori più popolari al mondo, il primo, e astrofisico dell’Università di Cambridge il secondo, nominato lord per meriti scientifici e già Astronomer Royal, cioè deputato a tenere edotta la Regina circa le ultime novità astronomiche. Lungi dal disapprovare l’esplorazione spaziale “abitata”, Goldsmith e Rees sono piuttosto contro l’uso di fondi pubblici per coprirne i costi e garantirne la sicurezza – secondo un rapporto del novembre 2021 stilato dall’Ispettore generale della Nasa, per la prossima avventura lunare, Artemis, gli Stati Uniti spenderanno circa 93 miliardi di dollari entro il 2025.
«La ritengo un’idea estrema, di certo provocatoria», ha replicato Krueger, al cui laboratorio è deputato proprio lo sviluppo delle interazioni uomo-macchina. «Se chiedessimo agli astronauti, direbbero che non c’è motivo di inviare i robot, perché mancherebbero l’occhio e l’intuito umani, la nostra capacità di improvvisare, spesso preziosa. In questo momento penso che la verità sia da qualche parte nel mezzo. Specialmente negli ambienti non strutturati di altri pianeti, l’intelligenza artificiale è a uno stadio infantile. È ovvio si stia lavorando per migliorarla, ma credo che per i prossimi anni avremo bisogno di umani, robot e cooperazione per raggiungere obbiettivi importanti, come l’esplorazione della Luna o Marte. Se gli umani sono gli occhi del robot e operano in remoto, allora si può fare molto più che lasciando un automa a se stesso. Fra dieci anni ne riparleremo».
È probabile siano questi i droidi che stiamo cercando. Numero 5, il robot senziente - ed empatico - di Corto circuito ne sarebbe felice.